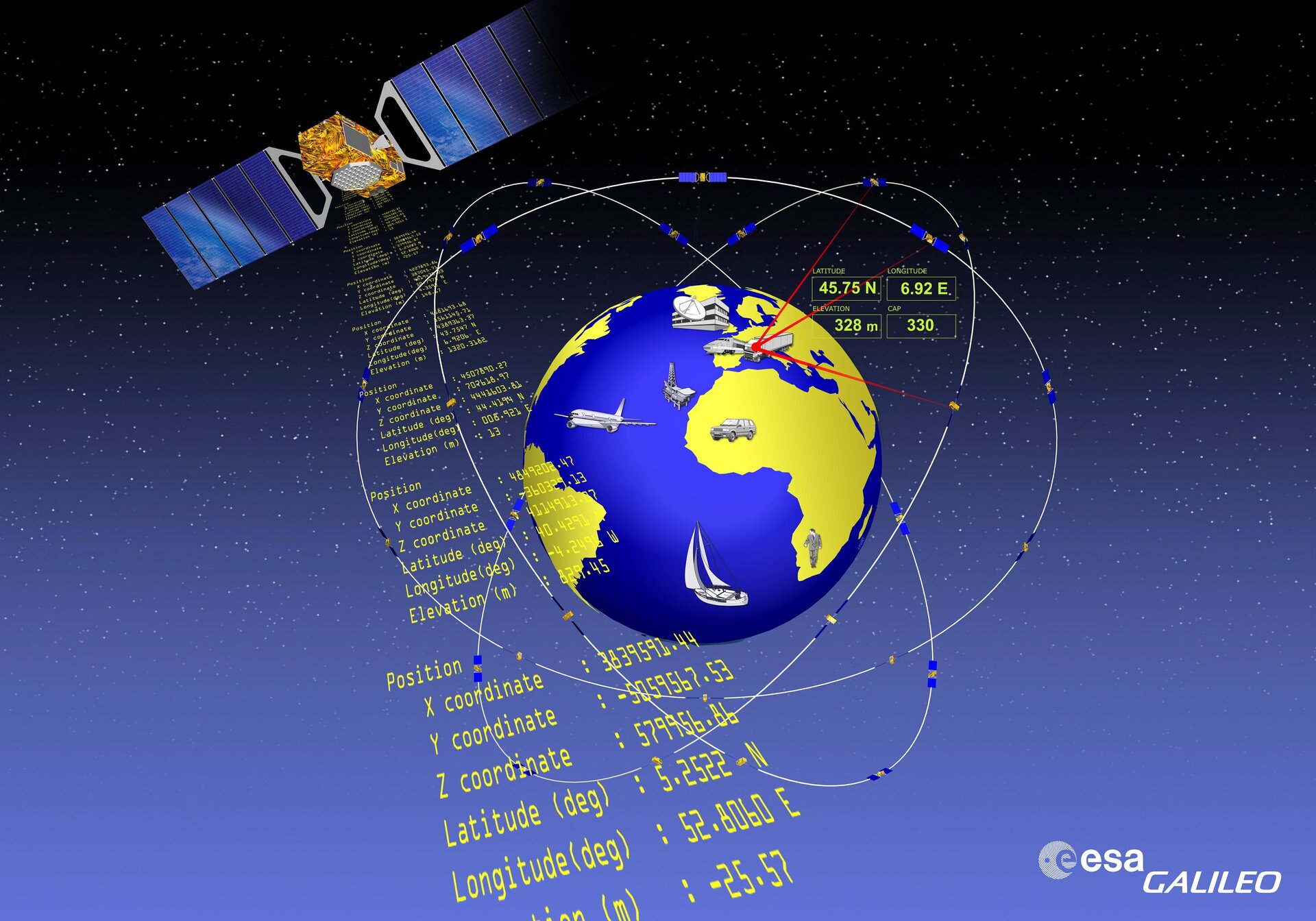
Le fonctionnement du système de positionnement par satellites est simple. Un récepteur reçoit une onde émise par le satellite. En connaissant la vitesse de la lumière, il est possible de déterminer la distance entre le satellite et le récepteur. Pour mesurer le temps mis par l'onde pour arriver au récepteur, celui-ci compare l'heure d'émission, insérée dans le code émis par le satellite, avec celle de la réception. Cette mesure est ce qu'on appelle, la pseudo-distance. Il s'agit d'une mesure approximative, liée à la précision de la synchronisation du récepteur. Une erreur d'un millionième de seconde provoque une erreur de 300 mètres sur la position. Pour pallier à ce manque de précision, plusieurs satellites sont nécessaires. En recoupant les données de 3 satellites, on obtient les coordonnées précises du récepteur.
En fonction de l'utilisation que l'on en fait, le système de positionnement est plus ou moins précis. Pour les applications militaires, la précision est centimétrique alors que pour les applications civiles, une précision métrique est suffisante.
Pour avoir un système de positionnement par satellites efficace, il est primordial de choisir l'orbite idéale. Les orbites utilisées jusqu'alors présentaient des avantages mais aussi des inconvénients. L'orbite basse nécessitait un nombre important de satellites vu la faible surface que le signal émis par le satellite couvrait mais avait l'avantage de pouvoir couvrir toutes les zones terrestres. L'orbite haute, dite géostationnaire offrait une surface de couverture maximale et donc ne nécessitait qu'un nombre minimal de satellites. Par contre, la zone de couverture ne pouvait aller au-delà de 70° Nord ou Sud. Pour les satellites de navigation, c'est une orbite de compromis entre les deux qui a été choisi. Elle est circulaire et se trouve à 20 000 km d'altitude avec une inclinaison de 55°. De là, un satellite met 12 heures pour effectuer un tour de la planète.
La raison d'être initiale du système de navigation par satellite est militaire. A tout moment, il permettait de localiser les troupes sur le théâtre des opérations. Un émetteur GPS a par la suite équipé les missiles, offrant un taux d'efficacité dans les attaques plus importantes, réduisant du même coup les dommages collatéraux.
Bien que la performance du signal GPS pour les applications civiles soit dégradée, il n'en reste pas moins efficace pour autant. Il trouve son utilité dans bon nombre de domaines. En voici quelques exemples.
Si l'on obtient de très bons résultats dans la géolocalisation, ils ne sont pas que le fait unique des satellites de navigation. Il faut également pouvoir associer les données fournies par les réseaux spatiaux avec la réalité du terrain. Pour se faire, il faut une cartographie des plus précises qu'il soit. Comme son nom l'indique, il se base sur un système mondial géodésique. Il s'agit d'une représentation de la surface terrestre plus précise qu'une représentation sphérique. Il tient compte du champ de gravité terrestre de manière à coller au plus près à la « surface réelle ».
Ceci dit, il est très difficile de l'utiliser dans des calculs. On préférera une référence ellipsoïdale qui est une sorte de « moyenne », relativement proche de la réalité présentant au maximum de quelques dizaines de mètres le géoïde.
Cependant, l'ellipsoïde seul ne suffit pas pour arriver à la précision voulue pour le système de navigation par satellites. Il est nécessaire de le positionner par rapport à la surface réelle de la Terre. Les données mathématiques de l'ellipsoïde associées aux paramètres de positionnement constituent ce qu'on appelle un datum géodésique à partir duquel pourra être appliquée une projection. Il existe plusieurs modèle mais celui qui est prédomine est sans conteste le WGS84 développé par le Department of Defense des Etats-Unis. Il utilise la projection UTM conforme de la surface de la Terre. UTM sont les initiales de « Universal Transverse Mercator ». Il s'agit d'une projection cylindrique où l'axe du cylindre croise perpendiculairement l'axe des pôles de l'ellipsoïde terrestre au centre de l'ellipsoïde. Il est découpé en 60 fuseaux de 6 degrés en séparant l'hémisphère Nord et l'hémisphère Sud. Seuls les pôles ne sont pas couverts.
Sources
A lire aussi
Les télécommunications | A quoi sert un satellite L'astronomie | A quoi sert un satellite Les sciences spatiales | A quoi sert un satellite La recherche en microgravité | A quoi sert un satellite L'observation de la Terre | A quoi sert un satellite La recherche technologique | A quoi sert un satellite La reconnaissance | A quoi sert un satellite L'alerte précoce | A quoi sert un satellite L'écoute électronique | A quoi sert un satellite La surveillance océanique | A quoi sert un satellite L'interception | A quoi sert un satellite