
Au lendemain de la mise sur orbite de Spoutnik, deux chercheurs de l'Applied Physics Laboratory de l'université Johns-Hopkins, George Weiffenbach et William Guier, se sont aperçus qu'ils étaient capables de déterminer la position du premier satellite artificiel de la Terre avec précision en analysant l'effet Doppler des signaux émis. De cette découverte, le directeur de l'ALP, Frank McClure, a suggéré que si la position du satellite était connue et prévisible, l'effet Doppler pourrait être utilisé pour localiser un récepteur sur Terre. De là est né le premier programme de positionnement par satellite, Transit, développé par l'APL. A la base, Transit devait fournir des informations sur la position des sous-marins transportant les missiles Polaris avant de se diversifier, notamment pour la navigation des navires de l'armée américaine mais aussi la surveillance hydrologique et géodésique. Le lancement du premier satellite Transit s'est soldé par un échec en septembre 1959. Sept mois plus tard, Transit 1B est placé sur une orbite de 373 × 748 km sur une inclinaison de 51,28° en compagnie d'un modèle expérimental SOLRAD dédié à l'étude des radiations solaires. La précision des Transit était de 100 mètres. Plusieurs générations de satellites Transit se sont succédées jusqu'en 1996, année durant laquelle, le programme est officiellement arrêté au profit du GPS.
Dans les années 60, le physicien D. Fanelli élabore une théorie sur le fonctionnement du positionnement par satellites. A partir de ces travaux, le Naval Research Laboratory de l'US Navy développe le programme TIMATION (Time Navigation). Chaque satellite transporte des horloges au quartz permettant des mesures de distance à l'aide du temps de propagation des signaux. Deux satellites sont lancés en mai 1967 et septembre 1969. De son côté l'US Air Force développe également son propre programme de navigation par satellites, le 621B Project. En 1973, les deux armées joignent leurs efforts pour développer un système unique, le DNSS (Defense Navigation Satellite System) et le propose au Department of Defense. Le Pentagone n'accepte pas le projet parce que le système n'était pas suffisamment intégré. Moyennant quelques améliorations, il est finalement accepté sous l'appellation Global Positionning Satellites System, que l'on pourrait traduire par « Système global de positionnement par satellites ». L'année suivante, TIMATION III, rebaptisé NTS 1 (Navigation Technology Satellite 1) est lancé avec succès. Il sert de banc d'essai pour le futur GPS, notamment par la présence des premières horloges atomiques au rubidium. Cet isotope stable permet d'obtenir des horloges ayant une stabilité relative de fréquence d'une erreur possible de 1 seconde sur un peu plus de 600 ans. Sur NTS 2 lancé en 1977, les horloges de rubidium sont remplacées par celles de césium nettement plus précises. En effet, l'erreur n'est que d'une seule seconde sur 1,6 millions d'années.
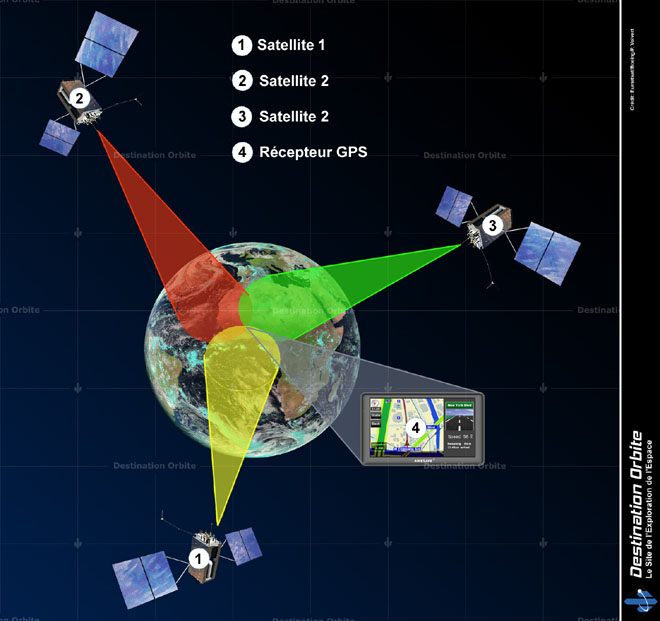
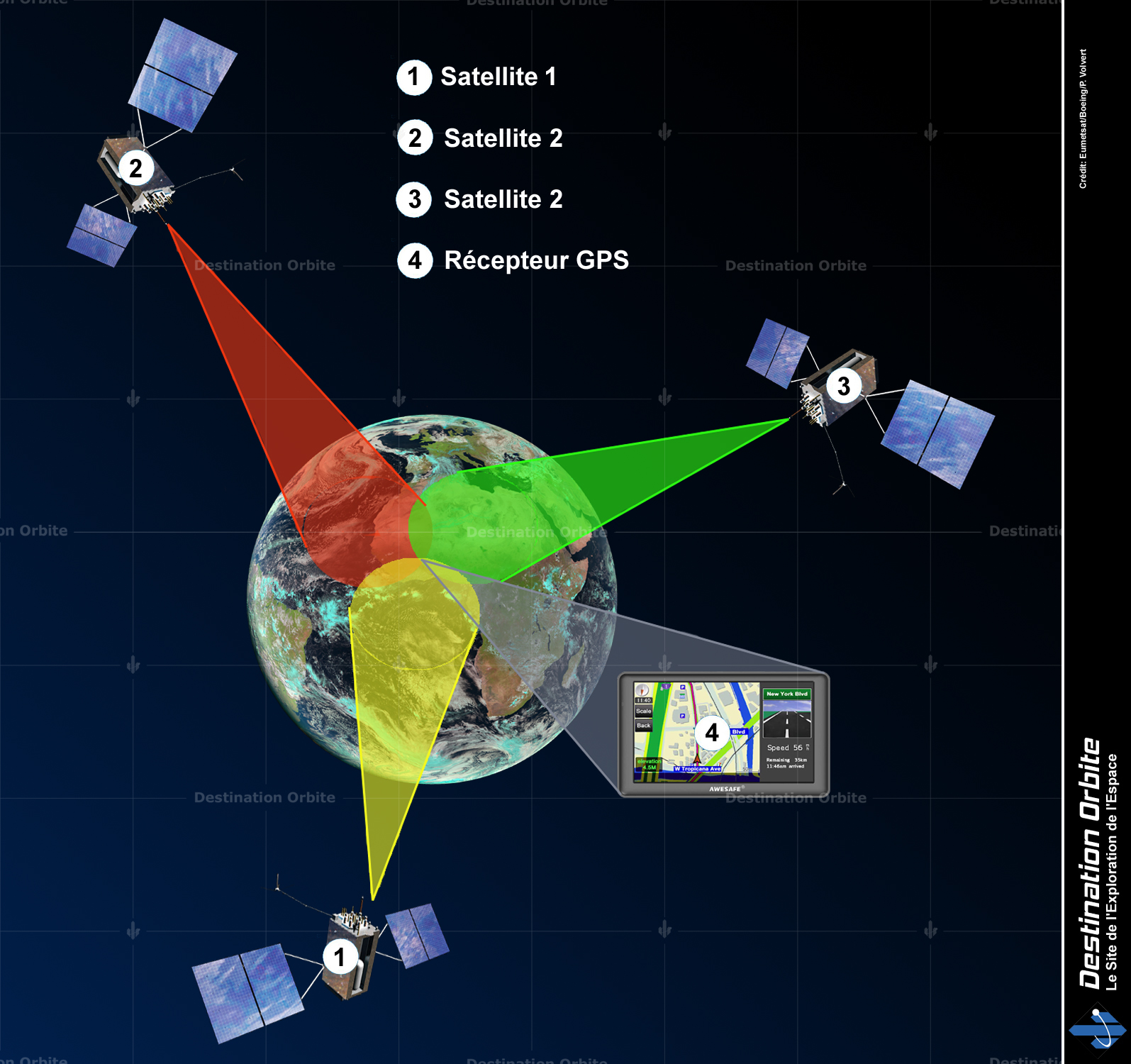
Pour comprendre ce qu'est le GPS, il est peut-être important d'expliquer le mode de fonctionnement du positionnement par satellites. Le principe de base est simple. Le fonctionnement du système de positionnement par satellites est simple. Un récepteur reçoit une onde émise par le satellite. En connaissant la vitesse de la lumière, il est possible de déterminer la distance entre le satellite et le récepteur. Pour mesurer le temps mis par l'onde pour arriver au récepteur, celui-ci compare l'heure d'émission, insérée dans le code émis par le satellite, avec celle de la réception. Cette mesure est ce qu'on appelle, la pseudo-distance. Il s'agit d'une mesure approximative, liée à la précision de la synchronisation du récepteur. Une erreur d'un millionième de seconde provoque une erreur de 300 mètres sur la position. Pour pallier à ce manque de précision, plusieurs satellites sont nécessaires. En recoupant les données de 3 satellites, on obtient les coordonnées précises du récepteur. Un quatrième satellite vérifie le chronométrage des trois autres satellites pour s'assurer de la justesse de l'information.
Pour avoir un système de positionnement par satellites efficace, il est primordial de choisir l'orbite idéale. Les orbites utilisées jusqu'alors présentaient des avantages mais aussi des inconvénients. L'orbite basse nécessitait un nombre important de satellites vu la faible surface que le signal émis par le satellite couvrait mais avait l'avantage de pouvoir couvrir toutes les zones terrestres. L'orbite haute, dite géostationnaire offrait une surface de couverture maximale et donc ne nécessitait qu'un nombre minimal de satellites. Par contre, la zone de couverture ne pouvait aller au-delà de 70° Nord ou Sud. Pour les satellites de navigation, c'est une orbite de compromis entre les deux qui a été choisi. Elle est circulaire et se trouve à 20 000 km d'altitude avec une inclinaison de 55°. De là, un satellite met 12 heures pour effectuer un tour de la planète.
Le premier satellite GPS, appelé également NAVSTAR (Navigation Signal Timing and Ranging Global Positioning System), est lancé par une fusée Atlas le 21 févier 1978. Il est suivi par 10 autres satellites jusqu'en 1985 dont 9 avec succès. Cette première génération, connue sous la terminologie Block I, est construite par Rockwell International. Chacun des exemplaires, d'une masse de 760 kg, avait une durée de vie moyenne de 5 ans mais certains sont même montés à 10 ans. La mission principale de cette génération était de valider le réseau avant qu'il ne soit pleinement opérationnel. La précision des satellites Block I était de l'ordre du mètre.
Jusqu'alors le GPS était utilisé par les militaires bien qu'il y ait des applications civiles mais payantes. La tragédie du vol KAL 007 en septembre 1983 allait changer la donne. L'avion avait dérivé de sa route normale, survolant la presqu'île de la Kamtchatka. Les tensions étant fortes entre l'Est et l'Ouest à cette époque, l'avion civil avait été pris pour un avion espion avant d'être abattu sans sommation. Le bilan a fait état de 269 morts. Au lendemain de la tragédie, le Président Reagan a demandé à ce que le GPS devienne gratuit pour les applications civiles une fois le réseau devenu opérationnel.
Les premiers satellites opérationnels font leur apparition à partir de 1989 lorsque la seconde génération (Block II) est mise en service. Les satellites ont profité de l'expérience acquise par leurs aînés et des améliorations ont été apportées, notamment concernant leur autonomie. Ils sont capables de rester 14 jours sans contact avec le segment sol tout en gardant une précision suffisante. Ils ont été construits à 10 exemplaires (dont un qui n'a pas été lancé) par Rockwell International. Chacun avait une masse de 1 660 kg et avait une durée de vie optimale de 7,5 ans. Certains d'entre eux sont restés en service actifs plus de 10 ans.
L'armée américaine, ayant dépensé 12 milliards de dollars pour développer le système de navigation le plus précis au monde, souhaitait être la principale bénéficiaire de cette précision. C'est pourquoi, une fonction Accessibilité Sélective a été mise au point afin d'introduire des erreurs volontaires dans l'émission des signaux de chaque satellite. Ces erreurs permettaient de limiter la précision pour les utilisateurs civils mais aussi pour les éventuels ennemis qui auraient été tentés d'utiliser le GPS pour mettre au point des armes de précision contre les Etats-Unis. L'introduction de cette fonction intervient sur les Block II restants qui deviennent les Block IIA. Dix-neuf exemplaires sont lancés entre 1990 et 1997. Certains d'entre eux sont toujours en activité presque 20 ans après leur lancement. Chacun des satellites avait une masse au décollage de 1 816 kg. Entretemps, en juin 1993, le système est déclaré opérationnel.
L'Accessibilité Sélective sera désactivée en 2000 par le Président Clinton. Une étude a démontré que la désactivation ne remettrait pas en cause la sécurité nationale. Cependant, les Etats-Unis sont encore en mesure de « refuser sélectivement » les signaux GPS à une région donnée en cas de menace pour sécurité nationale.
Avec Block IIR, l'armée américaine se tourne vers un nouvel industriel. C'est à Lockheed Martin qu'échoit la mise au point de la nouvelle évolution de satellites de géolocalisation. Afin de réduire les coûts de développement et de production, Lockheed Martin réutilise une plateforme conçue pour les satellites commerciaux de télécommunications, l'AS4000. Les satellites bénéficient également de nombreuses améliorations dont une durée de vie optimale qui passe à 10 ans. Mais la principale amélioration est sans conteste une meilleure autonomie avec l'introduction d'un système permettant aux satellites de se transmettre mutuellement des messages sans aucun contact au sol. Ainsi, même si les satellites ne sont pas en contact direct avec les opérateurs du système, les communications sont possibles.
A la date du 09 janvier 2021, le réseau GPS comptait 31 satellites actifs: 8 de la série Block IIR, 7 de la série Block IIR-M, 12 de la série Block IIF et 4 de la série GPS III. Depuis 2018, les satellites vieillissants sont remplacés par des satellites GPS III.
Sources
{kind=link}